(This is part 2 of 3 of my essay
A Spectacular Simulacra. If you haven't been following along, see the abstract and index
here.)
So why did our beloved Science and Technology in the Arts seem to die on the vine in the 1970s? (Please note that this section is USA-centric and more polemic than incontestable).
Concept
Conceptual Art -- "The dematerialization of the art object" (Lippard) -- subsumed Systems Art and abandoned the object altogether. The focus shifted to social and political critique, helped along by Feminism and Performance. Although, as Shanken points out, the antipathy between Conceptual Art and Technology is illusory, the Art/Tech world lost its steam. The last little dying breaths of collaboration appeared in the Tele-communication movement, where artists working with NASA and others attempted to use newly open satellite communications technologies to connect to and collaborate with each other world-wide.
[edit, added 1/27/13]
Hans Haacke's work is emblematic of, if not pivotal to, this shift into conceptual art practice. Around 1970 he made a rapid change of medium from physical to social systems, which he claims was a natural progression. He also denies that he is a Conceptual Artist -- which may be the ultimate in Conceptualism. (artist interview in: Grasskamp, W., etal (2004).
Hans Haacke. Phaidon.)
Cybernetics and Artificial Intelligence were competing endeavors that had common roots (I have overly conflated them). But their strongest link was completely severed by the Minsky/Pappert take down of neural networks. Rather than taking a systems wide view, AI tended to work reductively from the top down with logical and symbolic representations. These however didn't capture the essence of Intelligence, and irrational exuberance was trumped by reality:
Within a generation ... the problem of creating 'artificial intelligence' will substantially be solved.
Minsky (1967), Computation: Finite and Infinite Machines, Englewood Cliffs, N.J.: Prentice-Hall (p. 2)
But by the early 1980s rule based Expert Systems -- which seem to be inherently fragile -- were the main success story.
For an interesting look at where Cybernetics and Systems thinking went (into the social sciences) in 1973, have a look at this conversation between Stewart Brand, Gregory Bateson, and Margaret Mead:
For God’s Sake, Margaret.
At the same time the Hippy-Back-to-Nature thing was in full swing. Partially as a reaction to the Military Industrial Complex's complicity in the Vietnam War, Technology became Evil. I find this simplistic even though it is name-dropped in many places. While a certain cohort moved into the hills and became potters, electronic musicians and video artists were well aware of the provenance of their toys, and all the while thought of their work as a perversion thereof.
Finance
Maybe we can blame it all on the Nixon Administration? There was a recession in the USA in the early 70's and the money dried up.
As Hans Haacke has
shown, the corporate funding model for art-extravaganzas shifted from research oriented --
9 Evenings -- to blockbusters --
The Treasures of King Tut -- giving the corporations more widely appreciated social capital bang for their buck. Even today, a reviewer can just flat out say, "Most of the public doesn't like modernism" (Acocella, Bride Wars, New Yorker Dec 24, 2012). But our corporate marketing masters figured this out in 1970.
In a similar vein, the 1969
Mansfield Amendment "prohibited military funding of research that lacked a direct or apparent relationship to specific military function" (wikipedia). This cutoff a significant source of support for the more open-ended and unproductive components of Artificial Intelligence, and pushed research into what seemed to be more immediately rewarding areas.
Commerce
Electronic audio and video tools became commercially available and (mostly) affordable. These tools were largely targeted at traditional uses, e.g., keyboard synths and cinematic effect generators. For sale to the Lowest Common Denominator, they were easy to use for "normative" purposes and difficult for anything else (unless you could hack them). Personal computers became available in the late 70's and followed the same pattern, providing mass appeal applications and games while being reasonably recalcitrant for anything else. What followed was pop music, video games, and CGI movies.
The commodity Art Market did battle with Conceptualism and won. Conceptual Artists thought that if there were no objects to sell, no selling could take place (it's not entirely clear how they were to make an actual living in this system). But the Market quickly figured out how to sell documentation.
Academy
With the collapse of independent funding, artists retreated to compartmentalized teaching jobs in academe. There, in the 1980s, Postmodern Critical Theory swept the flotsam aside in a flood of seemingly erudite incomprehensibility:
Voegelin, S. (2010). Listening to noise and silence: Towards a philosophy of sound art. Continuum.
In this sense postmodernism is to modernism the noise of heterogeneity, working outside and across disciplines, squandering its systematic valuation in decadent centrifugality. The postmodern is a radicalization of the modernist understanding of the artwork.
And that's the (cherry picked) Reformed Standard Version talking...It does mean
something, but could surely have been expressed more clearly.
It is interesting that, just prior to Le Deluge, the Conceptual theorists embraced the Analytic and dismissed Contenential Philosophy (see Kosuth, (1969)
Art After Philosophy), but they often share similar ideas about de-centralized, contingent knowledge -- and occasionally their discursive style. The PoMo Revenge of the Literature Professors lead to the
Science Wars which alienated the sciences from the humanities. As a balance -- although the authors willfully ignore the good bits -- see:
Sokal, A., & Bricmont, J. (1999). Fashionable nonsense: Postmodern intellectuals' abuse of science. Picador.
The Result
What we got was
MTV, the
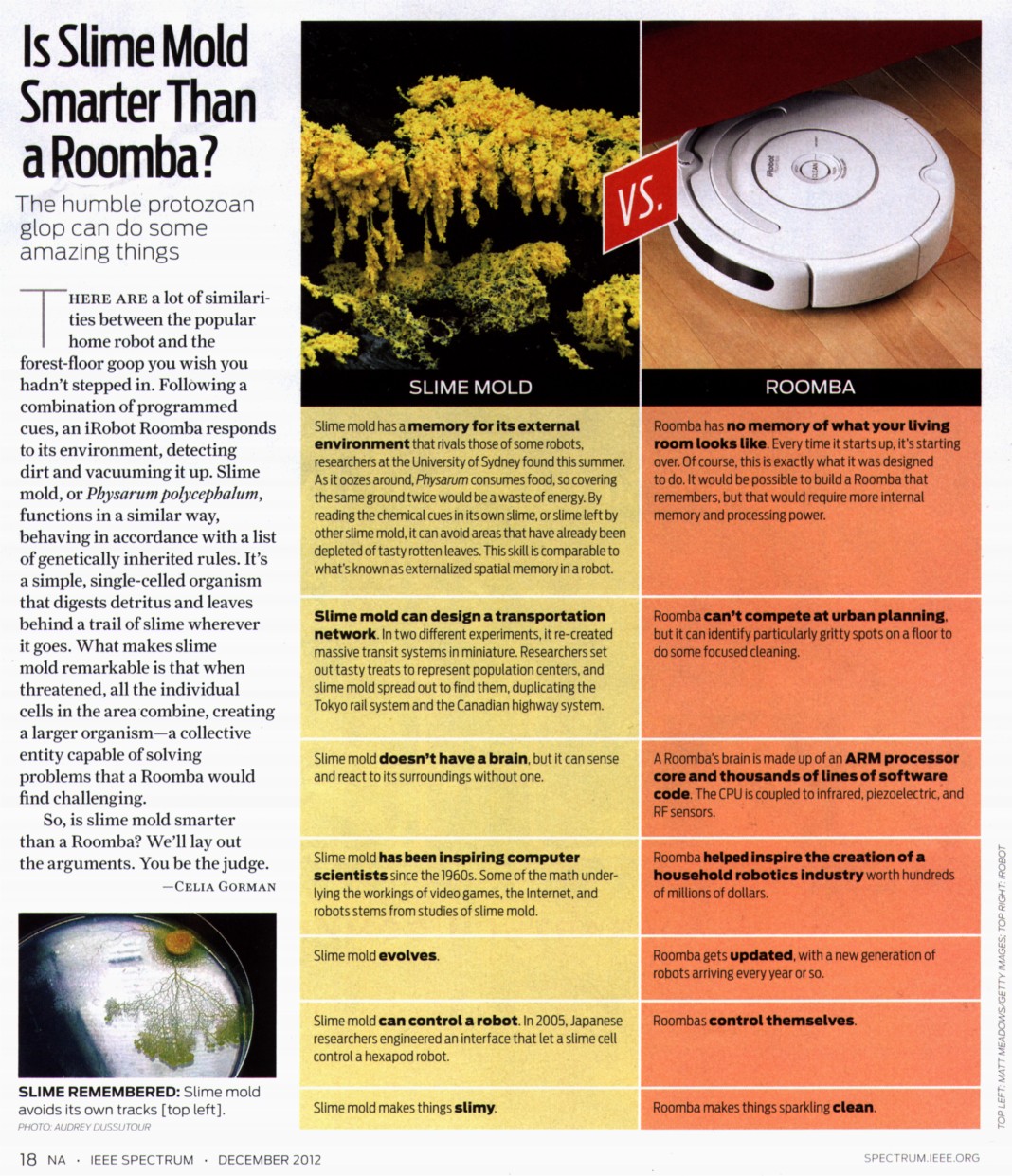
Roomba vacuum cleaner, and
Call of Duty: Black Ops (which BTW has the same number of wiki footnote references as the entire History of Artificial Intelligence).
I know. I know. What about Photoshop, Final Cut, Protools, MaxMSP, yadayada? They all (with the possible exception of MaxMSP) enable
harder-faster-deeper production in existing media rather than creating new aesthetic models.
Instead of a new sensibility, e.g., cybernetically based artificial life, we were sucked into a
Spectacular Simulacrum.
The Illusion of Control
The real problem is C3: Communications, Command, and Control...
Roy Ascott's Cybernetic Art Matrix
Ascott, R. (1966). Behaviourist Art and the Cybernetic Vision. Cybernetica, Journal of the International Association for Cybernetics (Namur), 9.
Fundamentally Cybernetics concerns the idea of the perfectibility of systems; it is concerned in practice with the procurement of effective action by means of self-organising systems. It recognises the idea of the perfectibility of Man, of the possibility of further evolution in the biological and social sphere. In this it shares its optimism with Molecular Biology. Bio-cybernetics, the simulation of living processes, genetic manipulation, the behavioural sciences, automatic environments, together constitute an understanding of the human being which calls for and will in time produce new human values and a new morality.
Salvador Allende's Project Cybersyn
Allende commissioned the British cybernetician Stafford Beer to build a computer system that could be used to manage Chile’s economy. The system, known as
Project Cybersyn, was never completely implemented. It was however used to
monitor and divert scab drivers (ironic italics my own) during a trucking strike, but that was more a matter of communication than homeostatic control.
This is the Modernist narrative in a nutshell
From the Industrial Revolution onward we expected not only to understand, but to control all of nature. The meta-narratives of Truth, Progress, and Sovereignty were (a tiny bit) over-optimistic. Post-Modernism questioned these stories without, IMHO, effectively addressing it's own narratives, and, without admitting that there are (un-capitalized) truths that we might know.
Once you peel back the rhetoric I think this is the mistake at the heart of the Science Wars. It was a critique of Technology, but Science got tarred with the same Modernist brush. Most (many, at least a few) scientists do not believe that they know, or even can, know it all (engineers on the other hand...) If we think of our experience as a
Hidden Markov Model (...ya,ya I hate to keep referencing wikipedia, but this is a pretty good article...), we may be sovereign over the observations, but they give us only a glimpse of the underlying mechanism. [edit, added 1/27/13] To me this is startlingly similar to Post Modern epistemology and should give us a place to begin repairing the rift.
[edit, added 1/27/13]
The conflation of Science and Engineering has deeply affected the discourse between Art and Science. It's one thing for artists to work with technology, they have always been early adopters. But working with Scientists is -- or should be -- different. Too many times what is billed as Art/Science Collaboration is either, a) artists getting access to cool sciency toys; or, b) scientists getting access to cool arty presentations. While those are both noble endeavors they have little to do with actual collaboration between the participants.
So, if we can no longer Know and Control, what
can we do?
(continue to Part 3:
Into the Grey Areas)